Description
商品簡介
【工作環境】
AmebaD RTL8722CSM/RTL8722DM目前支持Windows XP/7/8/10 32位元/64位元,Linux以及Mac作業系統。在本文檔中,請使用1.8.12或更高版本的Arduino IDE。
Ameba是一個易於編程的微控制器平台,可用於開發各種物聯網應用程序。 AmebaD有各種外圍接口,包括WiFi, GPIO INT, I2C, UART, SPI, PWM, ADC。通過這些接口,AmebaD可以連接LED、開關、壓力計、濕度計、PM2.5粉塵傳感器等電子元件。
Ameba所收集的數據可以通過WiFi無線上傳,並被智能設備上的應用程序使用,實現物聯網的應用。
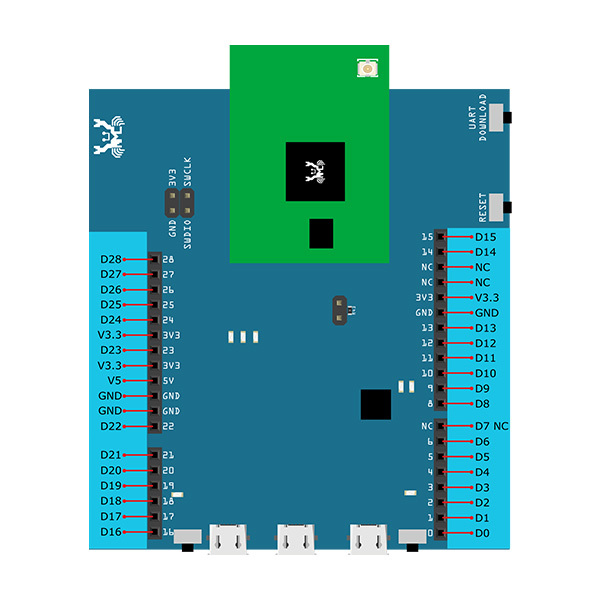
AmebaD和Arduino Uno的尺寸類似,如上圖所示,並且AmebaD上的引腳與Arduino Uno兼容。
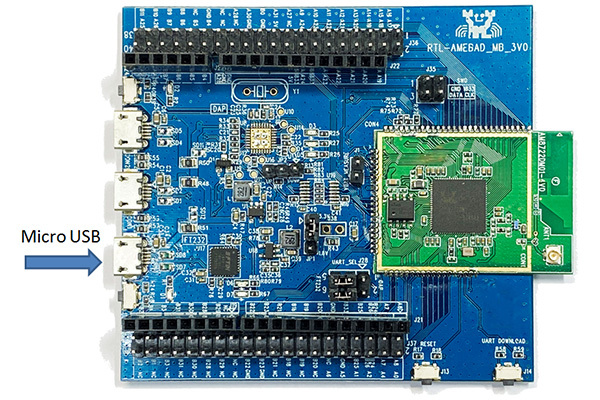
AmebaD使用Micro USB來供電,這在許多智能設備中很常見。
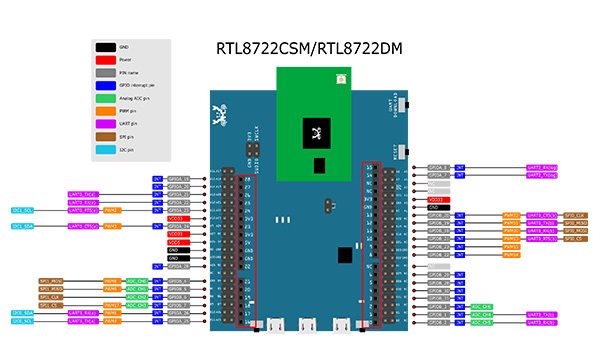
AmebaD的引腳圖和功能請參考下圖和表格。

| | PIN name | GPIO INT | ADC | PWM | UART | SPI | I2C |
| D00 | GPIOB_2 | V | ADC5 | | UART3_RX(b) | | |
| D01 | GPIOB_1 | V | ADC4 | | UART3_TX(b) | | |
| D02 | GPIOB_3 | V | ADC6 | | | | |
| D03 | GPIOB_31 | V | | | | | |
| D04 | GPIOB_30 | V | | | | | |
| D05 | GPIOB_28 | V | | | | | |
| D06 | GPIOB_29 | V | | | | | |
| D07 | NC | | | | | | |
| D08 | GPIOB_22 | V | | PWM14 | | | |
| D09 | GPIOB_23 | V | | PWM15 | | | |
| D10 | GPIOB_21 | V | | PWM13 | UART0_RTS(b) | SPI0_CS | |
| D11 | GPIOB_18 | V | | PWM10 | UART0_RX(b) | SPI0_MOSI | |
| D12 | GPIOB_19 | V | | PWM11 | UART0_TX(b) | SPI0_MISO | |
| D13 | GPIOB_20 | V | | PWM12 | UART0_CTS(b) | SPI0_CLK | |
| D14 | GPIOA_7 | V | | | UART2_TX(log) | | |
| D15 | GPIOA_8 | V | | | UART2_RX(log) | | |
| D16 | GPIOA_25 | V | | PWM4 | UART3_RX(a) | | I2C0_SCL |
| D17 | GPIOA_26 | V | | PWM5 | UART3_TX(a) | | I2C0_SDA |
| D18 | GPIOB_7 | V | ADC3 | PWM17 | | SPI1_CS | |
| D19 | GPIOB_6 | V | ADC2 | | | SPI1_CLK | |
| D20 | GPIOB_5 | V | ADC1 | PWM9 | | SPI1_MISO | |
| D21 | GPIOB_4 | V | ADC0 | PWM8 | | SPI1_MOSI | |
| D22 | GPIOA_28 | V | | | | | |
| D23 | GPIOA_24 | V | | PWM3 | UART0_CTS(a) | | I2C1_SDA |
| D24 | GPIOA_23 | V | | PWM2 | UART0_RTS(a) | | I2C1_SCL |
| D25 | GPIOA_22 | V | | | UART0_RX(a) | | |
| D26 | GPIOA_21 | V | | | UART0_TX(a) | | |
| D27 | GPIOA_20 | V | | | | | |
| D28 | GPIOA_19 | V | | | | | |
商品特色
- 超低功耗適合物聯網應用
- 最新的高安全架構,具有安全啟動功能
- 雙 Arm® 供電的 CPU 可實現更高的效能
- 利用 Wi-Fi 5GHz 和 BLE5 等最新無線技術實現快速無線速度
- 豐富的I/O外設,進一步擴展您的項目
設置開發環境
步驟1: 安裝驅動程序
首先,通過Micro USB將AmebaD連接到電腦:
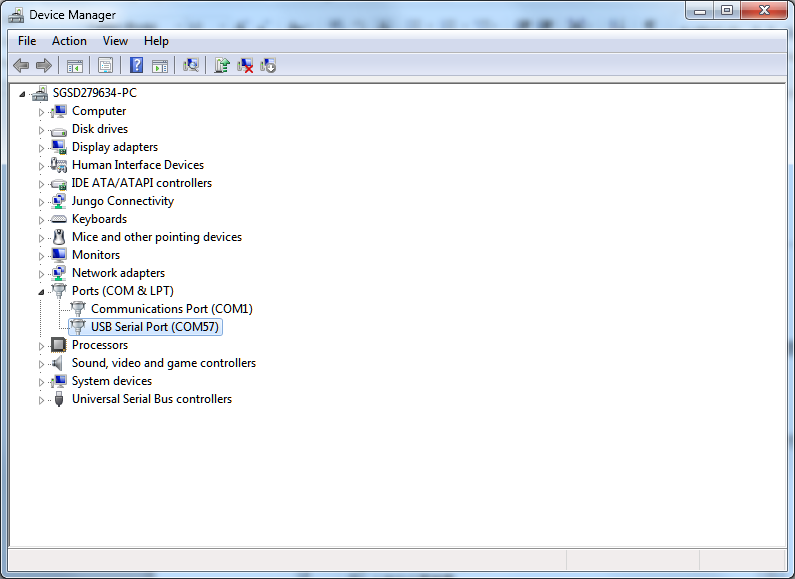
如果這是您第一次將AmebaD連接到您的計算機,那麼AmebaD的USB驅動程序將自動安裝。
你可以在你的電腦的設備管理器中檢查COM端口號:
步驟2: 設置Arduino IDE
從1.6.5版本開始,Arduino IDE支持第三方硬件。因此,我們可以使用Arduino IDE在AmebaD上開發應用程序,Arduino的範例也可以在AmebaD上運行。 Arduino IDE可以在Arduino網站下載:
https://www.arduino.cc/en/Main/Software
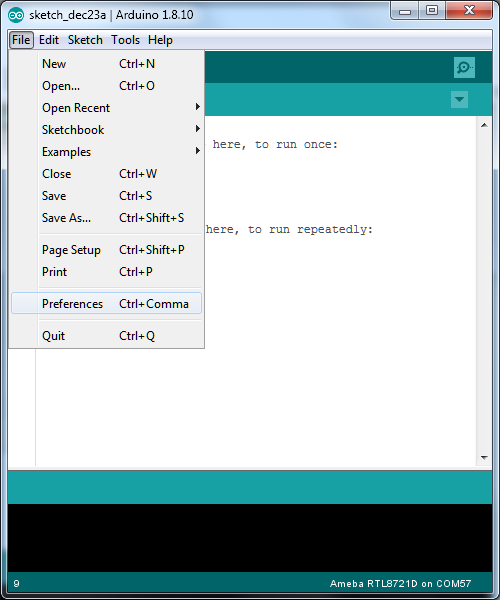
安裝完成後,打開Arduino IDE。為了在Arduino IDE中正常使用AmebaD,請打開“文件”—>“首選項”
並將以下網址粘貼到“附加開發版管理器網址”欄位:
https://github.com/ambiot/ambd_arduino/raw/master/Arduino_package/package_realtek.com_amebad_index.json
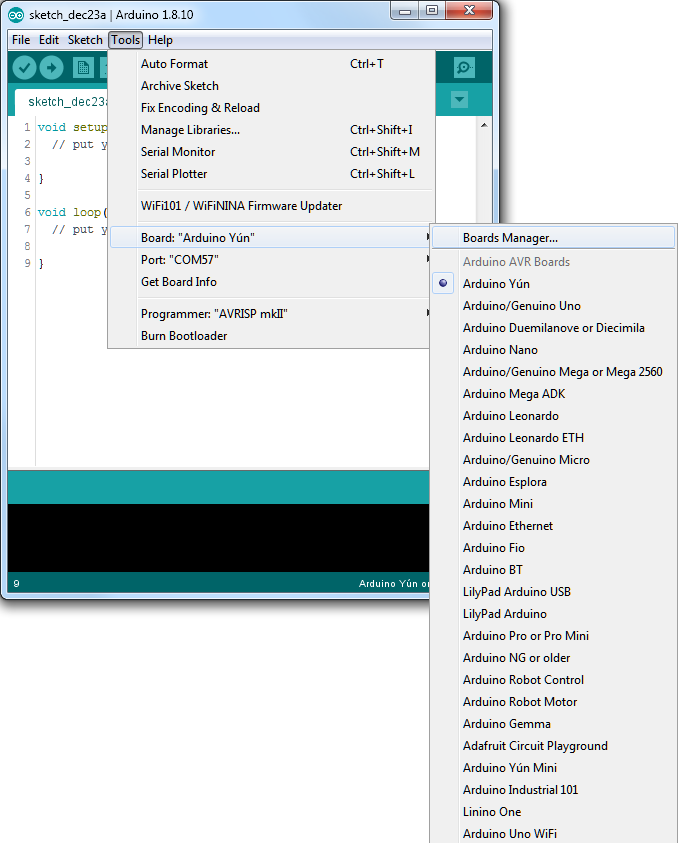
接下來,轉到“工具”->“開發板”->“開發板管理器”:
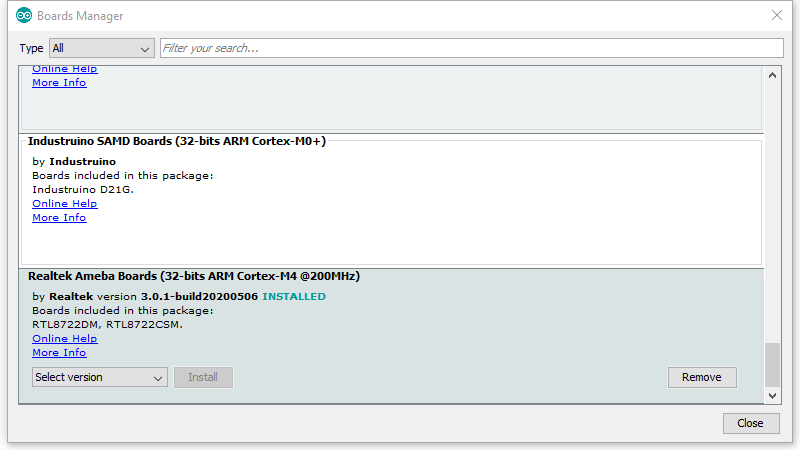
“開發板管理器”大約需要10~20秒來刷新所有硬件文件(如果網絡狀況不好,可能需要更長的時間)。每次連接新硬件時,我們都需要重新打開板管理器。因此,我們先關閉板管理器,然後再次打開它。在列表中找到“Realtek AmebaD Boards”,點擊“安裝”,Arduino IDE會自動開始下載AmebaD所需的文件。
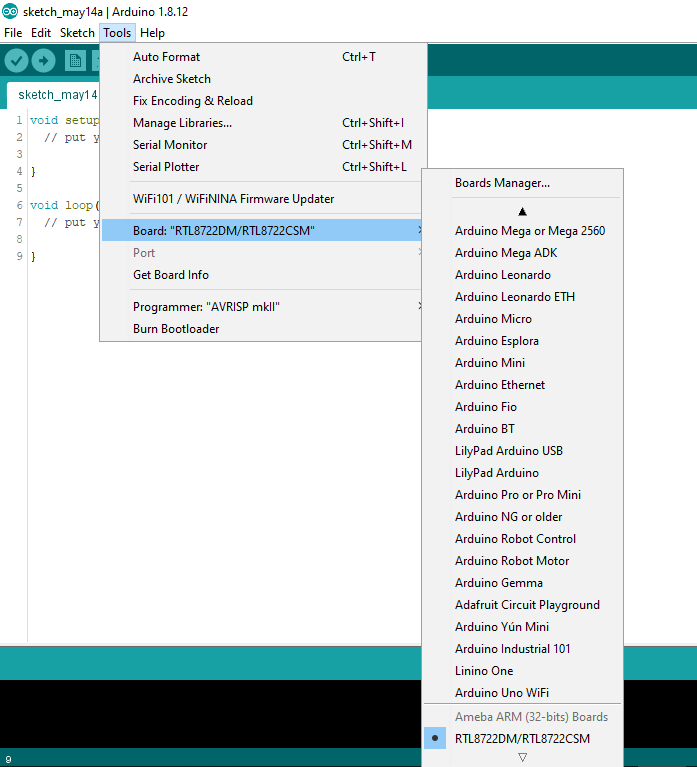
最後,我們在“工具”->“開發板”->“Arduino AmebaD”中選擇了AmebaD作為當前連接的開發板:
【測試第一個範例】
步驟1: 編譯並上傳
Arduino IDE提供了很多內建的例子,可以在板子上直接編譯、上傳和運行。這裡,我們以“Blink”為例進行第一次嘗試。
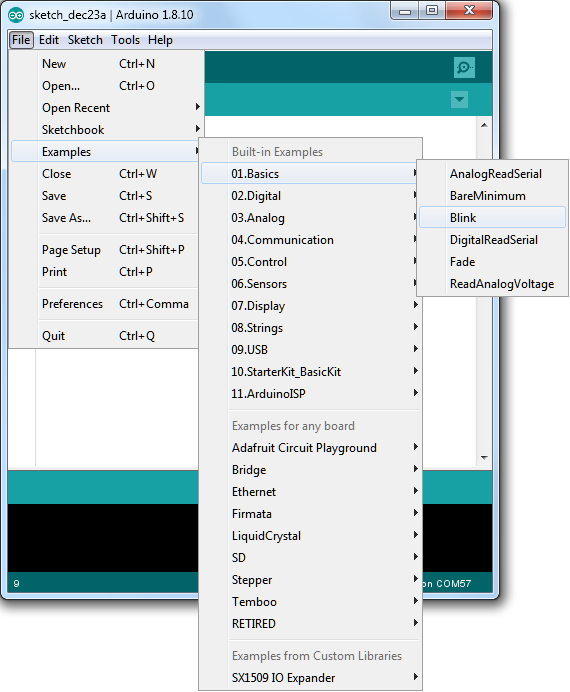
打開“文件”->“範例”->“ 01.Basics”-> “Blink”:
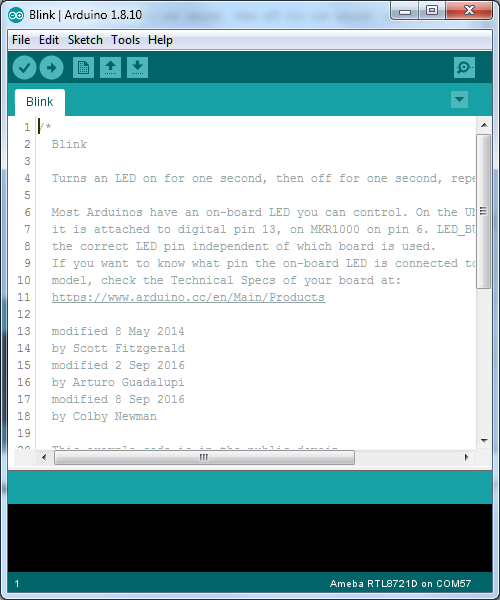
Arduino IDE打開一個帶有完整範例代碼的新窗口。
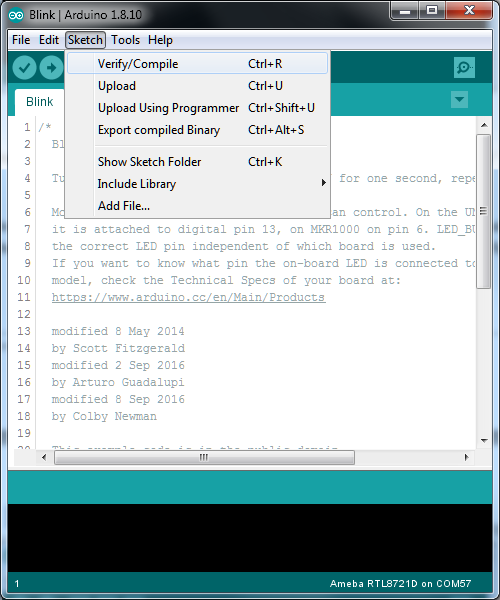
接下來,我們直接編譯範例代碼;點擊“項目”->“驗證/編譯”
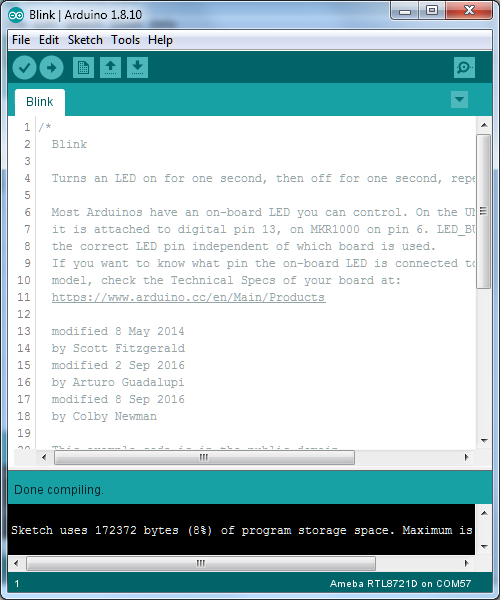
Arduino IDE在IDE窗口的底部區域打印編譯消息。編譯完成後,會得到如下圖所示的消息:
之後,我們將把編譯後的代碼上傳到AmebaD。請確保AmebaD已連接到您的計算機,然後單擊“項目”—>“上傳”
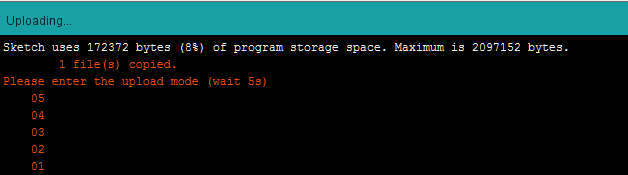
Arduino IDE將首先編譯,然後上傳。在上傳過程中,用戶需要將開發板調至上傳模式。 Arduino IDE會等待5秒鐘,等待開發板進入上傳模式。
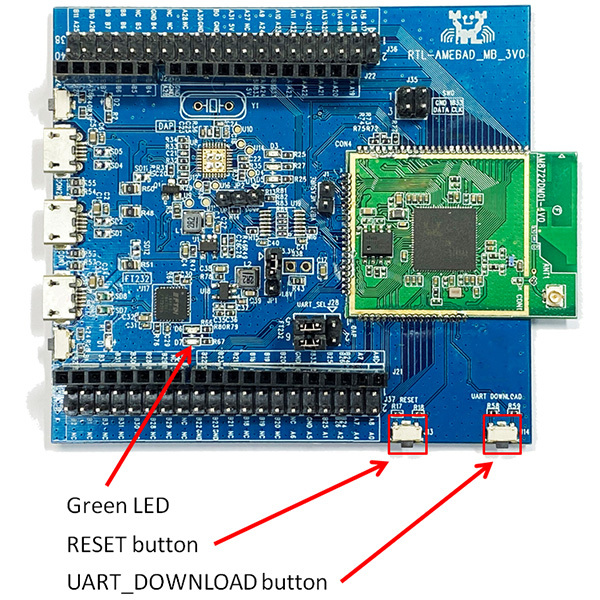
想要進入上傳模式,首先按住UART_DOWNLOAD按鈕不放,然後輕按RESET按鈕。如果成功的話,您應該會在開發板上看到閃爍的綠色LED,之後就可以放開按鍵。
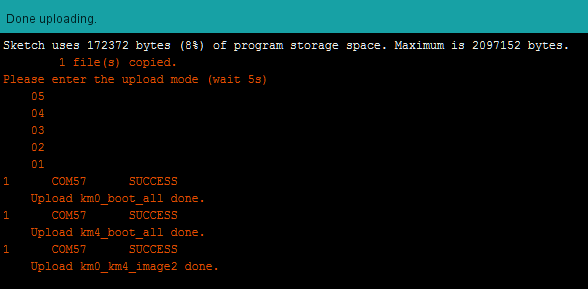
同樣,在上傳過程中IDE會自動顯示消息。上傳過程需要相當長的時間(大約30秒到1分鐘)。上傳完成後,您會看到“完成上傳”消息。
步驟2: 運行Blink範例
在每個範例中,Arduino不僅提供了範例代碼,還提供了詳細的文檔,包括接線圖、範例代碼說明、技術細節等。這些範例可以直接用於AmebaD。在這裡我們可以找到Blink這個範例的詳細信息:
https://www.arduino.cc/en/Tutorial/Blink
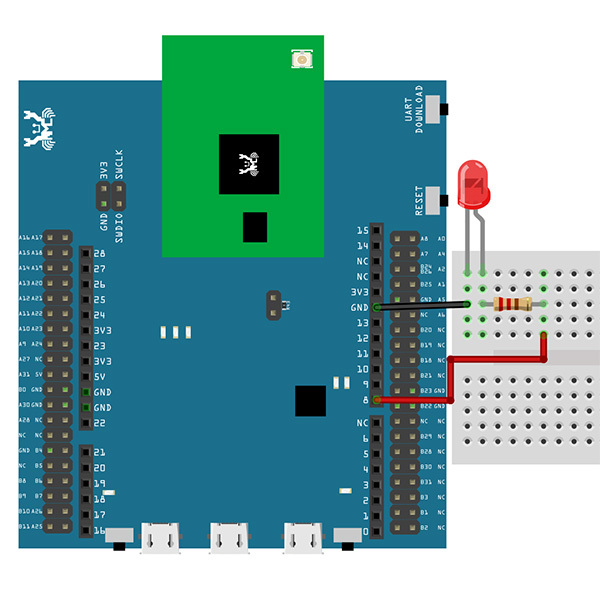
簡而言之,這個範例會使LED不停地閃爍。它使用的是GPIO引腳08(參考引腳圖D08)。我們把LED和電阻連接起來,如下圖所示:(注意:在一個LED中,較長的引腳是正極,較短的引腳是負極。我們將較長的引腳連接到D08,並將較短的引腳連接到GND。另外,請在LED和GND之間串聯一個合適大小的電阻來保護LED)
最後,按復位按鈕,你就會看到LED開始閃爍。
如果您遇到任何問題,請參考故障排除。
出貨清單
- 瑞昱 Realtek AmebaD RTL8722DM 開發板 x 1